




Hệ thống đo lường thái độ




Tính năng sản phẩm
MS-100A0 là thái độ ba bậc tự do dựa trên công nghệ vi cơ (MEMS)
Hệ thống đo lường, con quay hồi chuyển MEMS hiệu suất cao tích hợp và máy đo gia tốc MEMS, thông qua thuật toán lọc sẽ tính toán góc nghiêng, góc cuộn và góc hướng của sóng mang trong thời gian thực.cũng có thể tùy chọn kết hợp với từ kế để đạt được khả năng tìm hướng bắc có độ chính xác cao và vận tốc góc 3 trục đầu ra và gia tốc 3 trục được sử dụng để điều khiển chuyển động.
Đặc tính sản phẩm
- Độ chính xác thái độ tốt hơn 0,1 °
- Phạm vi đo thái độ ±90°
- Dải nhiệt độ hoạt động: -40~65℃
- Môi trường rung: 10~2000Hz, 6g (RMS)
- Kiểu giao diện phong phú, hỗ trợ RS232, RS422, CAN và các giao diện chuẩn khác
- Thiết kế con dấu chống thấm nước
Đặc điểm điện từ
- Nguồn điện: 5V (điển hình), đầu vào điện áp rộng có thể tùy chỉnh 12~36V
- Công suất định mức: 0.5W (tối đa)
- Độ gợn: 100mV (cực đại đến cực đại)
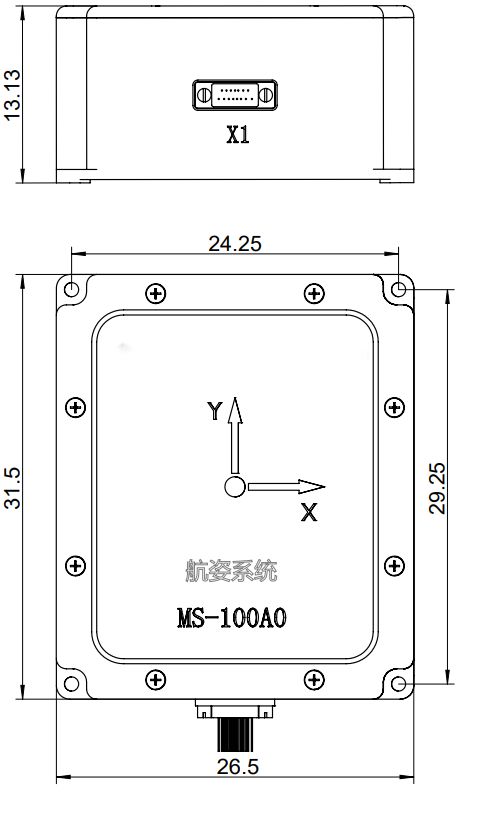
Kích thước cơ học
chỉ báo kỹ thuật
| thông số con quay hồi chuyển | ||||
| Tham số |
Điều kiện kiểm tra | giá trị điển hình |
giá trị tối đa | Bài học |
| Dải đo động |
|
| 450 | º/s |
| Độ ổn định không sai lệch | Phương sai Allan, trục Z | 0,8 |
| º/h |
| Phương sai Allan, trục X và trục Y | 1.6 |
| º/h | |
| Trung bình 10 giây, trục X, Y (-40℃~+80℃, nhiệt độ không đổi) | 6 |
| º/h | |
| Trung bình 1 giây, trục X, Y (-40℃~+80℃, nhiệt độ không đổi) | 9 |
| º/h | |
| Không bù đắp | Phạm vi bù không | ±0,2 |
| º/s |
| Không thay đổi sai lệch trong phạm vi nhiệt độ đầy đủ | ±0,06 |
| º/s | |
| Khả năng lặp lại từ đầu đến đầu | 0,006 |
| º/s | |
| Sự lặp lại bắt đầu hàng ngày | 0,009 |
| º/s | |
| Ảnh hưởng của gia tốc tuyến tính đối với độ chệch bằng không | 0,002 |
| º/s | |
| Ảnh hưởng của rung đến độ lệch gốc, sự thay đổi trước và sau rung | 0,002 |
| º/s | |
| Ảnh hưởng của rung động đến độ lệch gốc, sự thay đổi trước rung động | 0,002 |
| º/s | |
| Yếu tố quy mô | Độ chính xác của hệ số tỷ lệ, trục Z | 0,3 |
| % |
| Độ chính xác của hệ số tỷ lệ, trục X, Y | 0,6 |
| % | |
| Hệ số tỷ lệ phi tuyến tính, trục Z | 0,01 |
| %FS | |
| Hệ số tỷ lệ phi tuyến tính, trục X, Y | 0,02 |
| %FS | |
| Góc đi bộ ngẫu nhiên |
| 0,001 |
| °/√giờ |
|
mật độ tiếng ồn |
| 0,001 |
| °/giây/√giờ |
| Nghị quyết |
| 3,052×10−7 |
| º/s/LSB |
| Băng thông |
| 200 |
| Hz |
| Thông số gia tốc kế | ||||
| Tham số |
điều kiện thử nghiệm |
giá trị điển hình | giá trị tối đa | Bài học |
| Dải đo động |
| 16 |
| g |
| Độ ổn định không sai lệch | Phương sai Allan | 0,03 |
| mg |
| Trung bình 10 giây (-40℃~+80℃, nhiệt độ không đổi) | 0,2 |
| mg | |
| Trung bình 1 giây (-40℃~+80℃, nhiệt độ không đổi) | 0..3 |
| mg | |
| Không bù đắp | Phạm vi bù không | 5 |
| mg |
|
Biến thiên độ lệch điểm không (cực đại đến cực đại) trong toàn bộ phạm vi nhiệt độ | 5 |
| mg | |
| Khả năng lặp lại từ đầu đến đầu | 0,5 |
| mg | |
| Sự lặp lại bắt đầu hàng ngày | 0,8 |
| mg | |
| Hệ số nhiệt độ không thiên vị | 0,05 | 0,1 | mg/℃ | |
| Yếu tố quy mô | Độ chính xác của hệ số tỷ lệ | 0,5 |
| % |
| Hệ số tỷ lệ phi tuyến tính | 0,1 |
| %FS | |
| Tốc độ đi bộ ngẫu nhiên |
| 0,029 |
| m/s/√giờ |
| mật độ tiếng ồn |
| 0,025 |
| mg/√Hz |
| Nghị quyết |
| 1,221×10−8 |
| g/LSB |
| Băng thông |
| 200 |
| Hz |
| Thông số từ kế (tùy chọn) | ||||
| Tham số | điều kiện thử nghiệm |
giá trị điển hình | giá trị tối đa |
Bài học |
| Dải đo động |
| 2,5 |
| gauss |
| Không bù đắp | môi trường phi từ tính | 15 |
| mgauss |
| độ chính xác của tiêu đề | ||||
| Độ chính xác tiêu đề từ tính |
| 0,5 |
| ° |
| Độ chính xác thái độ ngang | ||||
|
Độ chính xác góc nghiêng |
| 0,1 |
| ° |
| độ chính xác góc cuộn |
| 0,1 |
| ° |
| thông số con quay hồi chuyển | ||||
| Tham số |
Điều kiện kiểm tra | giá trị điển hình |
giá trị tối đa | Bài học |
| Dải đo động |
|
| 450 | º/s |
| Độ ổn định không sai lệch | Phương sai Allan, trục Z | 0,8 |
| º/h |
| Phương sai Allan, trục X và trục Y | 1.6 |
| º/h | |
| Trung bình 10 giây, trục X, Y (-40℃~+80℃, nhiệt độ không đổi) | 6 |
| º/h | |
| Trung bình 1 giây, trục X, Y (-40℃~+80℃, nhiệt độ không đổi) | 9 |
| º/h | |
| Không bù đắp | Phạm vi bù không | ±0,2 |
| º/s |
| Không thay đổi sai lệch trong phạm vi nhiệt độ đầy đủ | ±0,06 |
| º/s | |
| Khả năng lặp lại từ đầu đến đầu | 0,006 |
| º/s | |
| Sự lặp lại bắt đầu hàng ngày | 0,009 |
| º/s | |
| Ảnh hưởng của gia tốc tuyến tính đối với độ chệch bằng không | 0,002 |
| º/s | |
| Ảnh hưởng của rung đến độ lệch gốc, sự thay đổi trước và sau rung | 0,002 |
| º/s | |
| Ảnh hưởng của rung động đến độ lệch gốc, sự thay đổi trước rung động | 0,002 |
| º/s | |
| Yếu tố quy mô | Độ chính xác của hệ số tỷ lệ, trục Z | 0,3 |
| % |
| Độ chính xác của hệ số tỷ lệ, trục X, Y | 0,6 |
| % | |
| Hệ số tỷ lệ phi tuyến tính, trục Z | 0,01 |
| %FS | |
| Hệ số tỷ lệ phi tuyến tính, trục X, Y | 0,02 |
| %FS | |
| Góc đi bộ ngẫu nhiên |
| 0,001 |
| °/√giờ |
|
mật độ tiếng ồn |
| 0,001 |
| °/giây/√giờ |
| Nghị quyết |
| 3,052×10−7 |
| º/s/LSB |
| Băng thông |
| 200 |
| Hz |
| Thông số gia tốc kế | ||||
| Tham số |
điều kiện thử nghiệm |
giá trị điển hình | giá trị tối đa | Bài học |
| Dải đo động |
| 16 |
| g |
| Độ ổn định không sai lệch | Phương sai Allan | 0,03 |
| mg |
| Trung bình 10 giây (-40℃~+80℃, nhiệt độ không đổi) | 0,2 |
| mg | |
| Trung bình 1 giây (-40℃~+80℃, nhiệt độ không đổi) | 0..3 |
| mg | |
| Không bù đắp | Phạm vi bù không | 5 |
| mg |
|
Biến thiên độ lệch điểm không (cực đại đến cực đại) trong toàn bộ phạm vi nhiệt độ | 5 |
| mg | |
| Khả năng lặp lại từ đầu đến đầu | 0,5 |
| mg | |
| Sự lặp lại bắt đầu hàng ngày | 0,8 |
| mg | |
| Hệ số nhiệt độ không thiên vị | 0,05 | 0,1 | mg/℃ | |
| Yếu tố quy mô | Độ chính xác của hệ số tỷ lệ | 0,5 |
| % |
| Hệ số tỷ lệ phi tuyến tính | 0,1 |
| %FS | |
| Tốc độ đi bộ ngẫu nhiên |
| 0,029 |
| m/s/√giờ |
| mật độ tiếng ồn |
| 0,025 |
| mg/√Hz |
| Nghị quyết |
| 1,221×10−8 |
| g/LSB |
| Băng thông |
| 200 |
| Hz |
| Thông số từ kế (tùy chọn) | ||||
| Tham số | điều kiện thử nghiệm |
giá trị điển hình | giá trị tối đa |
Bài học |
| Dải đo động |
| 2,5 |
| gauss |
| Không bù đắp | môi trường phi từ tính | 15 |
| mgauss |
| độ chính xác của tiêu đề | ||||
| Độ chính xác tiêu đề từ tính |
| 0,5 |
| ° |
| Độ chính xác thái độ ngang | ||||
|
Độ chính xác góc nghiêng |
| 0,1 |
| ° |
| độ chính xác góc cuộn |
| 0,1 |
| ° |


